Mathematical Methods for Data Science
Keith Dillon
Spring 2020
Topic 3: Highlights of Linear Algebra
This topic:¶
- Overview
- Matrix Algebra & Vector spaces
- LU decomposition
- Orthogonal matrices
- Eigenvectors and eigenvalues
Reading:
- CTM Chapter 11 (the SVD) (optional)
- Strang part I (Highlights of Linear Algebra)
- https://math.mit.edu/~gs/learningfromdata/
- https://ocw.mit.edu/courses/mathematics/18-065-matrix-methods-in-data-analysis-signal-processing-and-machine-learning-spring-2018/index.htm
- https://www.ms.u-tokyo.ac.jp/news/docs/mmmf_10.pdf
I. Overview¶
Five Basic Problems¶
- $Ax=b$ --> Find $x$
- $Ax = \lambda x$ --> Find $\lambda$ and $x$
- $Av = \sigma u$ --> Find $u$, $v$, and $\sigma$
- minimize $\frac{\Vert Ax \Vert^2}{\Vert x \Vert^2}$ --> Find $x$
- Factor the matrix $A$ --> find rows and columns of factors
Goal: understanding problem, not just solving it¶
When does a solution $x$ exist for $Ax=b$?
If $A$ is a matrix of data, what parts of that data are most important?
"Data Science meets Linear Algebra in the SVD" -Gilbert Strang¶
Key info: column spaces, null spaces, eigenvectors and singular vectors
Applications¶
- Least squares
- Fourier transforms
- Web search
- Regression
- Training deep neural networks
II. Matrix Algebra & Vector Spaces¶
Vector space I¶
A vector space is a set of vectors with three additional properties (that not all sets of vectors have).
- Contains origin
- Closed under addition (of members of set)
- Closed under scalar multiplication (of a member in the set)
Vector space II¶
Start with a set of vectors
$$ S = \{\mathbf v_1, \mathbf v_2, ..., \mathbf v_n\} $$A vector space is a new set consisting of all possible linear combinations of vectors in $S$.
This is called the span of a set of vectors:
\begin{align} V &= Span(S) \\ &= \{\alpha_1 \mathbf v_1 + \alpha_2 \mathbf v_2 + ... + \alpha_n \mathbf v_n \text{ for all } \alpha_1,\alpha_2,...,\alpha_n \in \mathbf R\} \end{align}If the vectors in $S$ are linearly independent, they form a basis for $V$.
The dimension of a vector space is the cardinality of (all) its bases.
Example: Column space (of a matrix $\mathbf A$)¶
Treat matrix as set of vectors defined by columns, and define vector space spanned by this set:
$$ \mathbf A \rightarrow S = \{ \mathbf a_1, \mathbf a_2, ..., \mathbf a_n \} $$$$ \text{Columnspace a.k.a. } C(\mathbf A) = Span(S) $$Using definition of Span we can write: \begin{align} Span(S) &= \{\alpha_1 \mathbf a_1 + \alpha_2 \mathbf a_2 + ... + \alpha_n \mathbf a_n \text{ for all } \alpha_1,\alpha_2,...,\alpha_n \in \mathbf R\} \\ &= \{ \mathbf A \boldsymbol\alpha \text{ for all } \boldsymbol\alpha \in \mathbf R^n\} \end{align}
Where we defined $\boldsymbol\alpha$ as vector with elements $\alpha_i$.
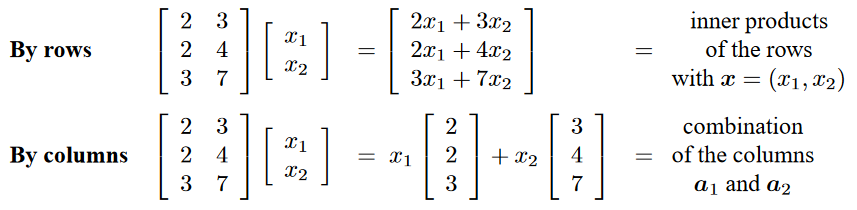
Multiplication $Ax$ using columns of $A$¶
Consider a 3x2 matrix $A$ multiplied by a 2x1 vector $x$
- Via dot products of rows of $A$ with $x$
- As linear combination of columns of $A$
Solution of $Ax=b$¶
Column space: the set of $Ax$ for all possible $x$
Solution: the $x$ for which $Ax=b$.
...so when does $x$ exist? (and when does $x$ not exist?)
A solution $x$ exists iff $b$ is in the column space of $A$. (draw it).
Subspaces of $\mathbb R^3$¶
Consider column spaces formed by all possible linear combination of $n$ (linearly independent) columns. What shape are they?
- $n=0$
- $n=1$
- $n=2$
- $n=3$
Linear independence¶
A set of vectors is linearly dependent if one can be written as a linear combination of the others.
What happens for the previous subspace cases?
Basis (of the column space of $A$)¶
A linearly independent set of vectors which span the same space as the columns of $A$
Algorithm for finding basis given set of columns by construction:
- start with an empty set $C$
- select a column $a$ from $A$
- test if $a$ is linearly depndent on columns in $C$
- if it is, add $a$ to set $B$, otherwise discard $a$
- repeat with each of the remaining columns of $A$
Dimension & Rank¶
The dimension of a space is the cardinality of a (every) basis
The rank of a matrix the dimension of its column spac
Row-reduced Echelon Form¶
Consider the basis $C$ for the column space of $A$
Every column in $A$ can be written as a linear combination of the columns in $C$
Express these relationships as matrices, with the linear combination coefficients as columns in a matrix $R$

Our first factorization of $A$
Recall: Row echelon form¶
$$ \begin{pmatrix} 1 & a & b & c \\ 0 & 0 & 1 & d \end{pmatrix} $$- Perform Gaussian elimination on rows to put pivots (first nonzero number in row) in increasing order
- "Reduced": pivot = 1
- This is a matrix description of our little construction algorithm!
- Why is there a 1 in the upper left (from our algorithm)?
- Why are there two leading zeros in the second row in this case?
Row rank vs. Column rank¶
- row rank is the number of independent rows, which is the number of rows in $R$
- column rank is the number of independent columns, which is the number of columns in $C$
where $A=CR$. How do these numbers relate?
Matrix-Matrix multiplication $AB = C$¶
Three "methods" now
- Elements of $C$ as dot products of rows and columns
- Columns of $C$ as linear combinations of rows of $A$
- $C$ as sum of outer products
1. Elements of $C$ as dot products of rows and columns¶

What is the equation for this? I.e. $C_{i,j} = ?$
2. Columns of $C$ as linear combinations of rows of $A$¶
Derive equation for this from previous version
3. $C$ as sum of outer products¶
Recall: Outer product of vectors¶
$$ w = uv^T$$All columns are multiples of $u$.
All rows are multiples of $v^T$


$2 \times 2$ example on page 10
Value of outer-product perspective¶
Consider rank-1 matrices as components, some tiny some large
For data science we usually want the most important info in the data, i.e. most important components
Common theme: factoring matrix $A = CR$ and look components $c_kr_k^T$
Four Fundamental Subspaces¶
The "big picture" of linear algebra
- Column space $C(A)$ = all linear combos of the columns of $A$
- Rowspace $C(A^T)$ = all linear combos of the rows of $A$, i.e. columns of $A^T$
- Nullspace $N(A)$ = all vectors $Ax$
- Left nullspace $N(A^T)$ = all vectors $A^Tx$
Example 1 pg. 14, rank-1 matrix¶
$$A = \begin{pmatrix}1 &2\\3 &6\end{pmatrix} = uv^T$$What are:
- column space
- row space
- null space
- left nullspace
Example 2 pg. 15, rank-1 matrix¶
$$B = \begin{pmatrix}1 &-2 &-2\\3 &-6 &-6\end{pmatrix} = uv^T$$What are:
- column space
- row space
- null space
- left nullspace
Counting Law¶
$r$ independent equations $Ax=0$ (where $A$ is $m \times n$) have $n-r$ independent solutions
(Rank-nullity theorem)
Dim of rowspace = dim of column space = $r$
Dim of nullspace = $n-r$
Dim of left nullspace = $m-r$
Note asymmetry of the left vs. right nullspaces
Example 3, pg. 16, Graph Incidence Matrix¶
Row of incidence matrix describes an edge
- $A_{ij} = -1$ means edge $i$ starts at node $j$
- $A_{ij} = +1$ means edge $i$ ends at node $j$
- hence rows sum to zero, so nullspace contains $(1,1,1,1)^T$ -- test by computing $Ax=0$
A linearly dependent set of rows (i.e. a solution to $A^Ty = 0$) forms a loop
Graph Incidence matrix subspaces¶
- $N(A) =\mathbf 1$, 1D nullspace is constant
- $C(A^T)$ = edges of tree, rank $=r=n-1$, independent rows
- $C(A)$ solutions to $Ax=0$, "voltage law"
- $N(A^T)$, solutions to $A^Tx=0$, loop currents... "current law"
Ranks: key facts¶
- $rank(AB) \le rank(A)$, $rank(AB) \le rank(B)$
- $rank(A+B) \le rank(A)+rank(B)$
- $rank(A^TA) = rank(AA^T) = rank(A) =rank(A^T)$
- if $m\times r$ $A$ is rank $r$ and $r\times m$ $B$ is rank $r$, then $AB$ is rank $r$
Recall can compute rank as number of independent columns, so consider columns of sum or product for above facts
III. LU Decomposition¶
Five important factorizations¶
- $A = LU$
- $A = QR$
- $S = Q\Lambda Q^T$
- $A = X\Lambda X^{-1}$
- $A = U\Sigma V^T$
Elimination and $LU$¶
Most fundamental problem of linear algebra: solve $Ax=b$
Assume square $A$ is $n \times n$ and and $x$ is $n \times 1$, so $n$ equations and $n$ unknowns.
- use first equation to create zeros below first pivot
- use next equation to create zeros below next pivot
- continue until have produced an upper triangular matrix $U$
Triangular matrix¶
Upper triangular $\mathbf U$ (a.k.a. $\mathbf R$)

Lower triangular $\mathbf L$. What is $\mathbf L^T$?

Next step...¶
Elimination: $[A | b] = [LU | b] \rightarrow [U|L^{-1}b] = [U|c] $
Back substitution: solve $Ux = c$ (easy since $U$ is triagonal) to get $x = U^{-1}c = U^{-1}L^{-1}b = A^{-1}b$
Triangular matrix - Value¶
- can easily solve linear system $\bf Ux=c$
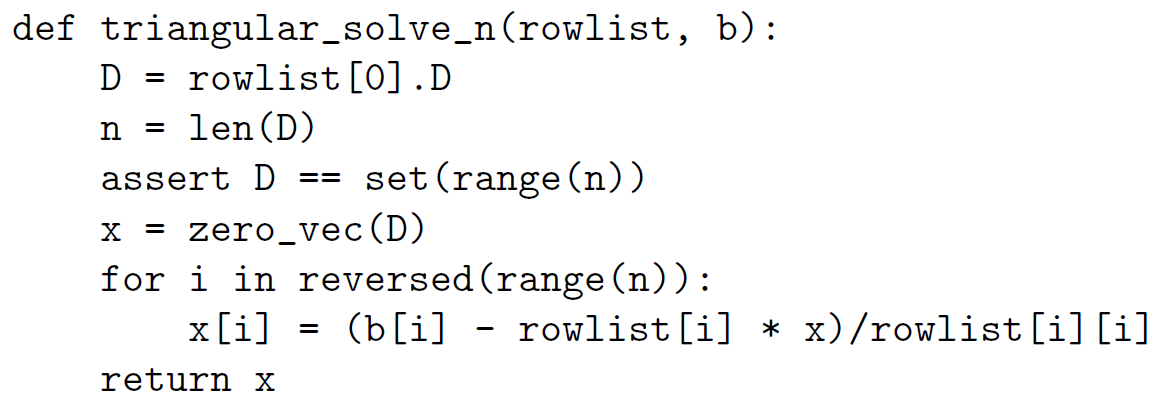
- note problem if have zero on diagonal
The $L$ matrix¶
- $L$ contains the multipliers we apply to the pivot to form $U$.
- View as parameters in a program we create from top row working downward
- $L_{ii} = 1$. we directly use the pivot value without scaling it
- $L_{ki}$ for $k>i$ is the number we scaled the pivot in row $i$ by to zero out element $ki$ in a lower row

Row Exchanges, a.k.a. Permutations¶
- Above algorithm assumes we had nonzero pivots, otherwise we'd need to reordre rows to get one
- General approach: choose largest number in column for pivot and reorder
- Permutation matrix - identiy matrix with rows (or equivalently columns) reordered
- General decomposition algorithm $PA = LU$
Applications of LU¶
- Solving linear systems (Elimination followed by subsitution)
- Computing determinant - $\det A = \det(PLU) = \det P \det L \det U = (-1)^p\prod_i L_{ii}U_{ii}$
- Inverting matrices
Basically all take advantage of ease of dealing with triangular matrices
IV. Orthogonal Vectors & Matrices¶
Orthogonal vectors¶
- Extension of idea of perpendicular vectors
- Orthogonal vectors $x$ and $y$.
- Test is $x^Ty = 0$
Law of Cosines¶
$$\Vert x-y\Vert^2 = \Vert x\Vert^2 + \Vert y\Vert^2 - \Vert x\Vert\Vert y\Vert\cos\theta$$Orthogonal basis for a subspace,¶
- $\{v_i, v_2, ..., v_k\}$ where $v_i^Tv_j = 0$ for $i\ne j$
- $v_i^Tv_i = \Vert v_i \Vert^2$.
- if unit vectors: $\Vert v_i \Vert^2 = 1$ $\rightarrow$ orthonormal basis
Standard Basis for $\mathbb R^3$¶
$$ i=\begin{pmatrix} 1\\ 0\\ 0 \end{pmatrix}, \; j=\begin{pmatrix} 0\\ 1\\ 0 \end{pmatrix}, \; k=\begin{pmatrix} 0\\ 0\\ 1 \end{pmatrix}$$Orthogonal subspaces¶
$R$ and $N$ where for every $u\in R$ and $v \in N$ $u^Tv=0$
Example: rowspace and nullspace of a matrix
Nullspace: $Ax=0$ directly implies $row\cdot x = 0$
Tall thin matrix $Q$ with orthonormal columns¶
$$Q^TQ = I$$$$\left(Q^TQ\right)_{ij} = q_i^Tq_j = \begin{cases} 1, i=j \\ 0, i\ne j \end{cases} $$where $q_i$ is the $i^{th}$ column of $Q$
So $Q$ doesn't change the length of a vector
Projection matrix¶
$$P = QQ^T$$$Pb$ is the orthogonal projection of $b$ onto the column space of $P$
Recall from physics, orthogonal unit vectors $\hat{x}$, $\hat{y}$, $\hat{z}$, use as columns of $P$
Key property of projection matrix: $P^2 = P$
Exercise: prove this
"Orthogonal matrices"¶
- square matrix with othonormal columns $Q^TQ = I$ so $Q^{-1} = Q^T$
- left inverse and right inverse
- columns are an orthonormal basis for $\mathbb R^n$
- rows also are an orthonormal basis for $\mathbb R^n$ (can be same one or different)
- should be called "orthonormal matrix"
Example: Rotation matrix¶
$$Q_{\theta} = \begin{pmatrix} \cos\theta & -\sin\theta \\ \sin\theta & \cos\theta \end{pmatrix}$$Rotates a vector by $\theta$
Example: Reflection matrix¶
$$Q_{\theta} = \begin{pmatrix} \cos\theta & \sin\theta \\ \sin\theta & -\cos\theta \end{pmatrix}$$Reflects a vector about line at angle $\frac{1}{2}\theta$
Coordinates¶
An orthogonal basis $\{q_1, ..., q_n\}$ can be viewed as axes of a coordinate system in $\mathbb R^n$
The coordinates within this system of a vector $v$ are the coefficients $c_i = q_i^T v$
Suppose $q_i$ are the rows of a matrix $Q$ (which is therefore an orthogonal matrix)
How do we compute $c_i$ given $v$ and $Q$?
Example: Householder Reflections¶
Reflection matrices $Q = H_n$
Defined as Identity matrix minus projection onto a given unit vector $u$... basically flip this component
Ex: $u = \frac{1}{\sqrt{n}}ones(n,1)$, $H_n = I - 2uu^T = I - ones(n,n)$
V. Eigenvalues and Eigenvectors¶
Eigenvector equation¶
$$Ax = \lambda x$$- $x$ is eigenvector of $A$
- $\lambda$ is eigenvalue of $A$
- Eigenvectors don't change direction when multiplied by $A$, they only get scaled
Exercise: find eigenvectors and eigenvalues for $A^k$ in terms of those from $A$
Exercise: find eigenvectors and eigenvalues for $A^{-1}$ in terms of those from $A$
Properties¶
- $trace(A) = $ sum of eigenvalues
- $det(A) = $ product of eigenvalues
- Symmetric matrices have real eigenvalues
- If two eigenvalues differ, the corresponding eigenvectors are orthogonal
- Eigenvectors of a real matrix $A$ are orthogonal iff $A^TA = AA^T$
Example: Eigenvalues of Rotation¶
$$Q = \begin{pmatrix}0 &-1\\1 & 0\end{pmatrix}$$Eigenvalues are $i$ and $-i$ for eigenvectors $\begin{pmatrix}1\\-i\end{pmatrix}$ and $\begin{pmatrix}1\\i\end{pmatrix}$. Test this.
Note that for complex vectors we define the inner product as $u^Hv$, conjugate transpose.
Eigenvalues of "shift"¶
Consider $A_s = A+sI$
What are the eigenvalues and eigenvectors of $A_s$ if we know $Ax=\lambda x$?
Similar Matrices¶
Consider $A_B = BAB^{-1}$, where $B$ is an invertible matrix
$A_B$ and $A$ are called similar matrices
How do the eigenvalues of similar matrices relate?
Diagonal matrix¶
$$D = \begin{bmatrix} D_{1,1} & 0 & 0\\ 0 & D_{2,2} & 0 \\ 0 & 0 & D_{3,3}\\ \end{bmatrix}$$Can completely describe with a vector $\mathbf d$ with $d_i = D_{i,i}$
Hence we write "$\mathbf D = \text{diag}(\mathbf d)$" and "$\mathbf d = \text{diag}(\mathbf D)$"
Relate to Hadamard product of vectors $\mathbf D \mathbf v = \mathbf d \odot \mathbf v$.
Diagonalizing a matrix¶
Suppose we have $n$ independent eigenvectors for $Ax_i=\lambda_i x_i$, $i=1,...,n$
Combine these into the matrix decomposition $A = X\Lambda X^{-1}$
What are the properties of $X$ and $\Lambda$?
Construction of a matrix with specified Eigenvectors¶
Another illustration of diagonalization is the fact that the diagonalization formula can also be used to construct a matrix that has specified eigenvalues and eigenvectors.
Example:
Let $\lambda_1 = -1$ and $\lambda_2 = 2$ be the eigenvalues corresponding to the eigenvectors ${\bf u}_1 = \begin{bmatrix}5\\3\end{bmatrix}$ and ${\bf u}_2 = \begin{bmatrix}3\\2\end{bmatrix}$.
Find a matrix $\bf A$ which gives these eigenvalues and eigenvectors.
We start by constructing $\bf U$ and $\boldsymbol\Lambda$:
$${\bf U} = \left[ \begin{matrix} {\bf u}_1 & {\bf u}_2 \end{matrix} \right] = \left[ \begin{matrix} 5 & 3 \\ 3 & 2 \end{matrix} \right]~~~~\text{and}~~~~{\boldsymbol\Lambda} = \left[ \begin{matrix} \lambda_1 & 0 \\ 0 & \lambda_2 \end{matrix} \right] = \left[ \begin{matrix} -1 & 0 \\ 0 & 2 \end{matrix} \right]$$Thus $${\bf U}^{-1} = \left[ \begin{matrix} 2 & -3 \\ -3 & 5 \end{matrix} \right]$$ This gives $${\bf A} = {\bf U}\boldsymbol\Lambda{\bf U}^{-1} = \left[ \begin{matrix} 5 & 3 \\ 3 & 2 \end{matrix} \right]\left[ \begin{matrix} \lambda_1 & 0 \\ 0 & \lambda_2 \end{matrix} \right]\left[ \begin{matrix} 2 & -3 \\ -3 & 5 \end{matrix} \right] = \left[ \begin{matrix} -28 & 45 \\ -18 & 29 \end{matrix} \right]$$
Check that these satisfy the eigenvector equation.
Check:¶
$${\bf A u}_1 = \left[ \begin{matrix} -28 & 45 \\ -18 & 29 \end{matrix} \right] \left[ \begin{matrix} 5 \\ 3 \end{matrix} \right] = \left[ \begin{matrix} -5 \\ -3 \end{matrix} \right] = (-1)\left[ \begin{matrix} 5 \\ 3 \end{matrix} \right]$$$${\bf A u}_2 = \left[ \begin{matrix} -28 & 45 \\ -18 & 29 \end{matrix} \right] \left[ \begin{matrix} 3 \\ 2 \end{matrix} \right] = \left[ \begin{matrix} 6 \\ 4 \end{matrix} \right] = (2)\left[ \begin{matrix} 3 \\ 2 \end{matrix} \right]$$Hence $\lambda_1$ and $\lambda_2$ are eigenvalues of $\bf A$ associated with eigenvectors ${\bf u}_1$ and ${\bf u}_2$
Example: Defective matrix¶
Suppose we DON'T have $n$ independent eigenvectors for $Ax_i=\lambda_i x_i$, $i=1,...,n$
$$A = \begin{pmatrix}3 &1\\0 & 3\end{pmatrix}$$Compute the eigenvalues and eigenvectors
Symmetric Matrices¶
Properties
- All $n$ eigenvalues of a symmetric matrix $S$ are real numbers
- The $n$ eigenvectors can be chosen orthogonal - and orthonormal
Example: Identity Matrix $I$¶
- Eigenvalues are all 1
- Any nonzero vector $x$ is an eigenvector: $Ix = 1x$
Therefore we choose to pick orthonormal eigenvectors
Spectral Theorem¶
For every real symmetric matrix $S$ we can decompose as
$$S = Q \Lambda Q^T$$Where $Q$ is orthonormal and $\Lambda$ is diagonal and real.
Exercise: test symmetry of $Q \Lambda Q^T$
Applications of eigendecomposition $S = Q \Lambda Q^T$¶
Use it to:
- solve $Ax=b$
- Find inverse of matrix $A$
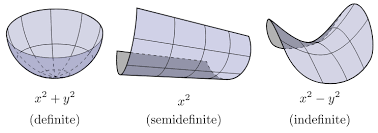
Positive Definiteness¶
- all positive eigenvalues = Positive definite matrix
- all non-negative eigenvalues = Positive semi-definite matrix
"Energy-based definition" - Positive definite matrix $S$ has $x^TSx>0$ for all $x\ne 0$
Examples (compute $x^TSx$)¶
$$S = \begin{pmatrix}2 &0\\0 & 6\end{pmatrix}$$Proving $x^TSx>0$ for all $x\ne 0$¶
$$Sx = \lambda x$$multiply both sides by $s^T$
Exercise: prove $S_1+S_2$ is PD if both $S_1$ and $S_2$ are PD
"$AA^T$ test"¶
A symmetric Positive definite matrix $S$ can be factored as
$$S=AA^T$$Where $A$ has independent columns.
There are many possible choices for $A$
Consider $A=Q\sqrt{\Lambda}Q^T = A^T$ (a matrix "square root")
Cholesky Factorization¶
$A = LDL^T$, where $D$ is diagonal and $L$ comes from $LU$ decomposition.
Algorithms take advantage of symmetry so roughly twice as fast as $LU$.
Same handy uses as $LU$ otherwise.

Optimization¶
Surface described by $x^TSx$ is elliptical and has a unique minimum when $S$ is PD
Axes described by eigenvectors and eigenvalues. Consider diagonalization as coordinate transform.
Recap - general real square matrix $A$¶
- eigenvalues may be complex
- eigenvectors may not be independent (matrix is called "defective")
- if not defective, can form decomposition $A = X\Lambda X^{-1}$ (a.k.a. diagonalize)
- if eigenvalues are nonzero (i.e. matrix is also non-singular), can form inverse, $LU$ decomposition
Recap - Symmetric real matrix¶
- real eigenvalues
- can always diagonalize $A = X\Lambda X^{-1} = Q\Lambda Q^T$ (i.e. X is orthonormal matrix $Q$)
Recap - Symmetric real Positive definite matrix¶
- Has real positive eigenvalues
- Can generally form decomposition $A = BB^T$
- Can find Cholesky decomposition $A=LU$ or "LDL" decomposition $A=LDL^T$
- the quadratic form $x^TAx$ is always positive if $x \ne 0$, and has a unique minimum when $x=0$
SVD Motivation: Rectangular matrices¶
(particularly non-square real matrices)
$$A_{tall} = \begin{pmatrix}2 &0\\1 & 2\\5 &0\end{pmatrix}, \,\, A_{fat} = \begin{pmatrix}1 &3 &1\\2 & 0 & 1\end{pmatrix} $$- $Ax=b$ is essentially same as a system with a square matrix that isn't full rank*
- $Ax = \lambda x$ isn't solvable
SVD: Singular vectors¶
- Replace $Ax = \lambda x$ with $Av = \sigma u$
- $n$ right singular vectors $v_1, ..., v_n$
- $m$ left singular vectors $u_1, ..., u_m$